
| Other Research Projects |
| Networked Control Systems |
| Smart Electricity Grid |
| Past Projects |
Micro-actuator Control
Project 1: Dual-stage Control Systems
Funding Information: Funded by ARC Centre of Excellence, Centre for Complex Dynamic Systems and Control, Chief Investigators: Fu, Zheng, Chen, Salton.
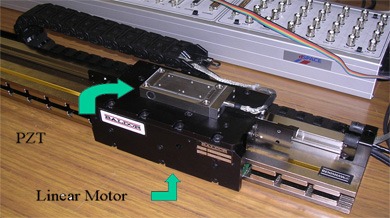
Project Summary: A dual-stage control system involves the use of two cascaded actuators, primary and secondary, to control the same motion. The basic idea is that the primary actuator offers a large dynamic range but with relatively slow response and poor precision, whereas the secondary actuator is able to give much faster response and better precision but with much more limited dynamic range. A simple example of such control systems is an robotic arm (or human arm) which has two joints. A more advanced and well celebrated example is dual-stage read-write head for modern hard disk drives which employs a piezo-electric tip on top of a traditional voice-coil motor. This is known to provide significant better tracking and seeking performance and greatly improves the storage density of hard disk drives. The experimental set-up shown in the diagram below is a dual-stage system we have studied in our lab. The primary stage is a linear motor which has a dynamic range of 500mm, precision of 1 mircometer and bandwidth of several ten's Hz. On top of it is a piezo transducer (PZT) which has a dynamic range of 30 micrometers with precision of 5 nanometers and bandwidth of several hundreds of Hz. The major challenge for control design of such a dual-stage system is to how to coordinate the two actuators so that the potentials of both actuators can be maximally utilized for fast seeking control, tracking control and robust disturbance rejection.
Project 2: Robust Control Design using Micro-Actuators
Funding Information: Funded by Australian Research Council, Discovery Grant 2004-2006, Chief Investigator: Fu.
Project Summary: Recent advances in micro-actuators have enabled many new applications in complex systems. Examples include ultra-high density disk drives, low-cost vibration tables, and micro-robotic systems. However, control design for these systems is very challenging because the micro-actuators have severely limited dynamic ranges and strong couplings. The proposed project aims to study new control design approaches for these complex systems. The work will focus on both theoretical studies and experimental applications of such systems. The outcome of the project will help put Australia in a more advanced position in this niche area of leading age technology.