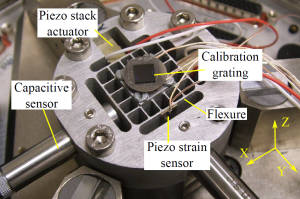
- Piezoelectric Strain Sensor
Piezoelectric
sensors have the benefit of simple interface circuitry, low cost, high
sensitivity, and high bandwidth. Although piezoelectric sensors have
been successfully used as vibration sensors in smart structures,
complications arise when they are used in a feedback loop for tracking.
As piezoelectric strain sensors exhibit a capacitive source impedance, a
high-pass filter is created, typically with a cut-off frequency of 1 to
10 Hz. This filter can cause significant errors and destabilize a
tracking control system. Here, we overcome this problem by using a
low-frequency bypass technique to replace the low-frequency component of
the strain measurement with an estimate based on the open-loop system.
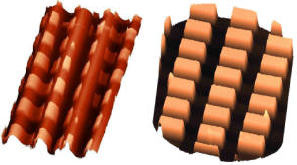
- High-speed Non-raster AFM Scanning
A
traditional AFM utilizes a scanner to scan over an area of a sample in a
zig-zag raster pattern. The fast axis of the AFM scanner is forced to
track the non-smooth triangular waveform that contains frequencies
beyond the scanner's mechanical bandwidth. The high-order dynamics of
the triangular waveform tends to trigger the resonance frequencies of
the scanner. This leads to image distortions. Therefore, smooth scan
patterns are proposed to achieve much higher speed scans than a raster
pattern.
[Left image: Distorted raster scanned image; Right image: Non-raster scanned image]
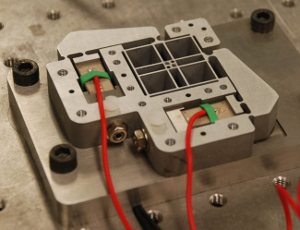
- Flexure-based Nanopositioners
The design of the flexure-based nanopositioning stage
is based on the concept of flexible mechanisms (flexures) where motions
are generated through the elastic deformation of the structures. There
are no moving and sliding joints; therefore, the problems of wear,
backlash, friction and the need for lubrication are eliminated. This
provides repeatable and smooth motions to fulfil the requirement of
accurate nanoscale positioning. Piezoelectric stack actuators are
commonly used to drive flexure-based stages due to their capability of
achieving repeatable nanometer resolution over a very high bandwidth.
They can also generate large forces and high accelerations which are
desirable for the design of a high bandwidth nanopositioner.
This project is aimed to improve the dynamic
performance of a nanopositioning scanner for high-speed scanning
applications of an AFM (Atomic Force Microscope). The project objectives
are: (a) to design a nanopositioning scanner which has relatively high
resonance frequency, large scan range & low cross-coupling between
the X-Y axis, and (b) to implement a well-performing control scheme that
provides substantial damping & accurate high-speed scanning
performances.

- Piezoelectric Tube Scanner
Piezoelectric tubes with quartered external electrodes
have been widely used as scanners in modern scanning probe microscopes.
Various feedback control techniques have been developed to improve
bandwidth and accuracy of these scanners. Non-contact displacement
sensors, e.g. capacitive and inductive sensors, have been used for
positioning feedback.
This project has several goals:
(a) To investigate different electrode sizes &
patterns for sensing and actuation; (b) To design a piezoelectric tube
with improved dynamic performances; and (c) To implement a control
scheme that provides substantial damping & accurate high-speed
scanning performances.